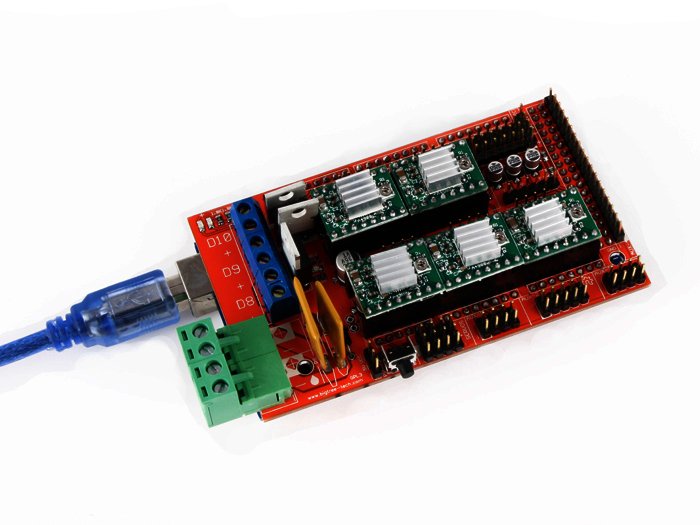
今回は、RepRap 3Dプリンターのコントロール基板としてよく使用されるRAMPS1.4にファームウェアをインストールしていきたいと思います。
RAMPS 1.4に対応しているファームウェアとしては、「Sprinter」と「Marlin」があります。Marlinは、Sprinterから派生したファームウェアになります。今回は、「Marlin」を使用したいと思います。
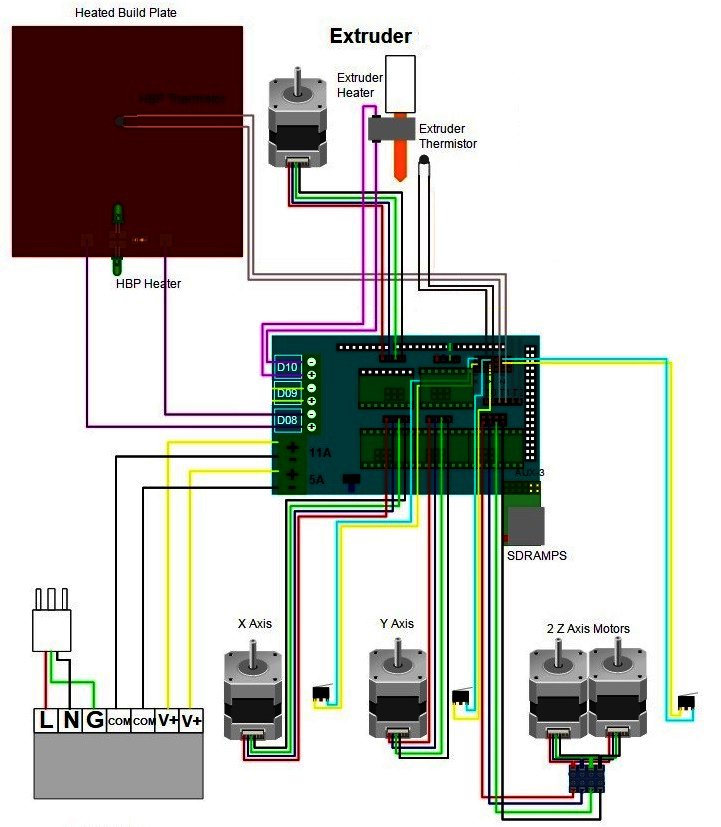
今回の3Dプリンターの構成は、X軸、Y軸、Z軸とエクストルーダ、ファン、ベットが一つずつになりますので、この構成に合わせて「Marlin」の設定を行っていきます。
Marlinのインストール
まずは、RAMPS1.4用のArduino Mega2560とPCをUSBで接続します。
次に「Marlin」のソースファイルは以下のサイトからダウンロードします。
MarlinFirmware/Marlin
ダウンロード後、ファイルを解凍し、「Marlin\Marlin\Marlin.ino」をArduino IDEで開きます。
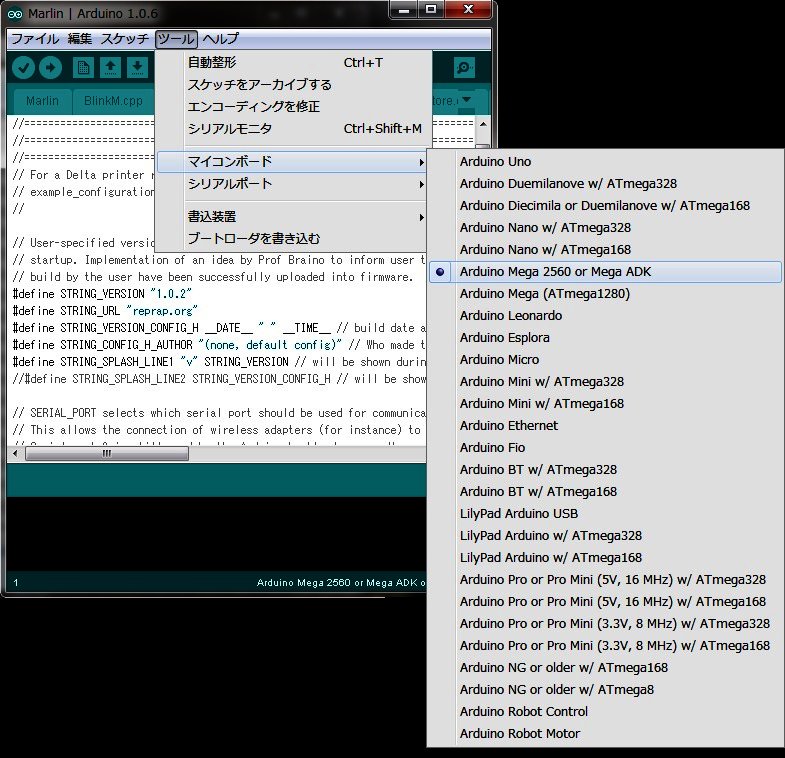
Arduino IDE起動後、マイコンボードの選択とシリアルポートの選択を行います。
「ツール→マイコンボード」で「Arduino Mega 2560 or Mega ADK」を選択
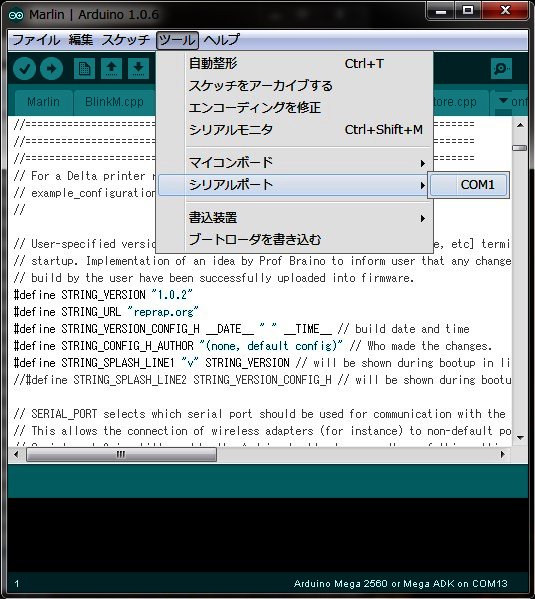
「ツール→シリアルポート」でArduino Megaのポートを選択
設定の変更
Arduino IDEの「Configuration.h」を開き、ボードタイプを以下のようにRAMPSに変更します。
62行目の「#define MOTHERBOARD BOARD_ULTIMAKER」を「#define MOTHERBOARD BOARD_RAMPS_13_EFB」に変更
次にサーミスタの設定を以下のように変更します。
122行目の「#define TEMP_SENSOR_0 -1」を「#define TEMP_SENSOR_0 1」に変更
123行目の「#define TEMP_SENSOR_1 -1」を「#define TEMP_SENSOR_1 0」に変更
125行目の「#define TEMP_SENSOR_BED 0」を「#define TEMP_SENSOR_BED 1」に変更
最後に軸の調整を行います。こちらは、使用している軸の構成により異なります。
今回は、X軸、Y軸をベルト、Z軸をリードスクリューを使用しています。
X軸、Y軸の計算
- 1回転ステップ数×マイクロステップ / プーリー歯数 / ベルトピッチ
- 200×16/20/2=80
Z軸の計算
- 1回転ステップ数×マイクロステップ / リードスクリューピッチ
- 200×16/8=400
エクストルーダの計算
- 1回転ステップ数×マイクロステップ / (ドライブギアの直径×円周率)×1.1
- 200×16/(10.9×3.14)×1.1=102.85
計算した結果を以下のように変更します。
510行目の「#define DEFAULT_AXIS_STEPS_PER_UNIT {78.7402,78.7402,200.08/3,7601.1} 」を「#define DEFAULT_AXIS_STEPS_PER_UNIT {80.0,80.0,1600.0,93.5} 」に変更
最後にコンパイルを実行し、マイコンボードに書き込みます。